Bac Centres étrangers 2021 Sujet 2
Exercice 1 – (10 points) – Commun à tous les candidats – Durée 1h45 – Calculatrice autorisée
Sujet n° 21-PYCJ2G11
Sujet et corrigé
Au cours de l’une des étapes de sa formation, un élève parachutiste doit apprendre à évaluer par lui-même la durée au bout de laquelle il doit actionner la commande de l’ouverture de son parachute, quelques secondes après avoir sauté de l’avion.
En cas d’urgence, un parachute de secours se déclenche automatiquement.
Mais avant de sauter, l’élève et son moniteur doivent pouvoir s’entendre parler dans l’avion !
Données :
- Masse de l’élève parachutiste et de son équipement : 𝑚 = 75,0 kg.
- Intensité du champ de pesanteur g = 9,81 m⋅s−2.
Partie 1 – Communication dans l’environnement bruyant de l’avion
Dans l’avion qui emmène le moniteur et son élève à l’altitude souhaitée, le niveau d’intensité sonore est L1 = 82 dB.
On estime que, dans le cas de deux émissions sonores simultanées, il faut que les niveaux d’intensité sonore soient séparés de 8 dB au minimum pour que le son le plus faible n’empêche pas d’entendre clairement le son le plus fort.
Données :
Le niveau d’intensité sonore L (dB) et l’intensité sonore I sont liés par la relation :
$L=10 log \left (\frac{I}{I_0}\right) $ avec I0 = 1,0 × 10-12 W·m-2, seuil d’audibilité ;
On estime qu’il est nécessaire de crier pour produire un son d’intensité sonore égale ou supérieure à IC = 1,0 × 10−3 W·m-2.
1. Préciser le niveau d’intensité sonore minimal L2 que doit avoir la conversation entre le moniteur et son élève pour qu’ils puissent s’entendre clairement en dépit du bruit de l’avion.
D’après le texte : « On estime que, dans le cas de deux émissions sonores simultanées, il faut que les niveaux d’intensité sonore soient séparés de 8 dB au minimum pour que le son le plus faible n’empêche pas d’entendre clairement le son le plus fort. »
L2=L1+8=82+8=90 dB
2. Indiquer, en justifiant, si la gêne occasionnée par le bruit de l’avion impose ou non au moniteur et à son élève de crier.
D’après le texte : « On estime qu’il est nécessaire de crier pour produire un son d’intensité sonore égale ou supérieure à IC = 1,0 × 10−3 W.m−2. »
Calculons l’intensité sonore I2 correspondant au niveau sonore L2 :
$$L_2=10\log\funcapply(\frac{I_2}{I_0})$$
$$10\log{\left(\frac{I_2}{I_0}\right)}=L_2$$
$$\log{\left(\frac{I_2}{I_0}\right)}=\frac{L_2}{10}$$
$$\frac{I_2}{I_0}={10}^\frac{L_2}{10}$$
$$I_2=I_0 \times {10}^\frac{L_2}{10}$$
$$I_2=1,0.{10}^{-12} \times {10}^\frac{90}{10}$$
$$I_2=1,0.{10}^{-3}W.m^{-2}$$
I2 = IC , il est donc nécessaire de crier.
Compte tenu du niveau d’intensité sonore dans l’avion, les pilotes utilisent des casques d’aviation ANR (pour Active Noise Reduction ou Réduction Active de Bruit), aussi appelés casques actifs, pour faciliter les communications. Le fonctionnement de ces casques repose sur une technologie électronique qui permet de capter les bruits extérieurs via un microphone placé sur la coque du casque, et d’émettre, dans l’écouteur du casque, un signal qui vient se superposer au bruit de l’avion de façon à le réduire.
3. Nommer le phénomène physique exploité par la technologie ANR.
La technologie ANR utilise le phénomène physique d’interférences destructives.
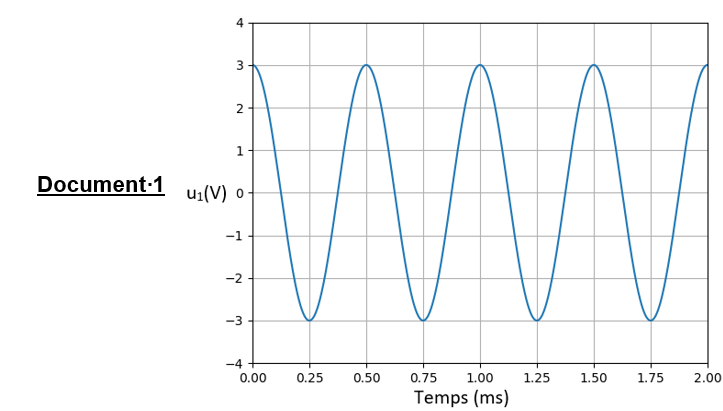
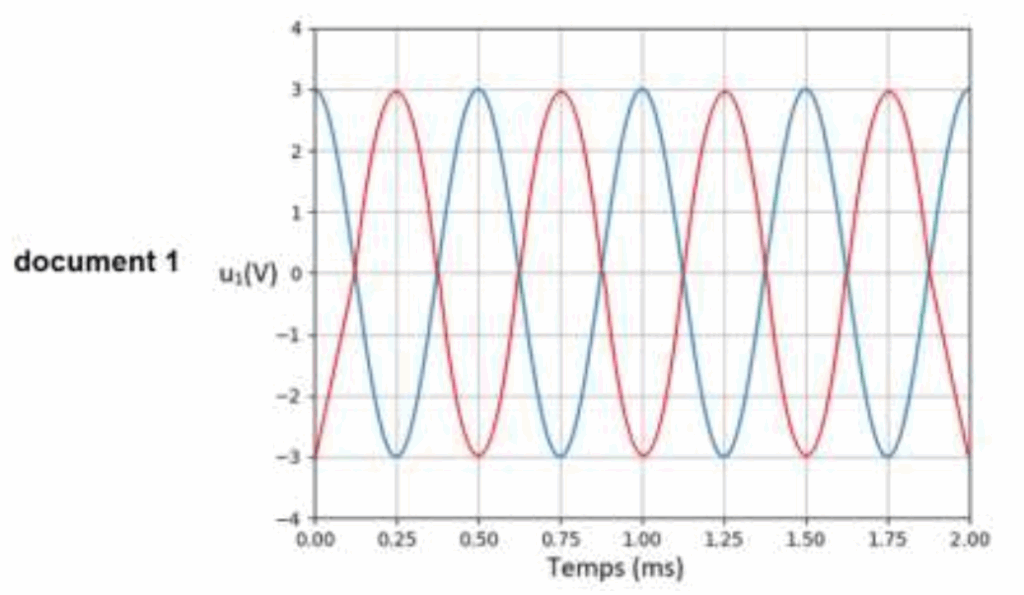
Afin d’illustrer au laboratoire le principe d’un casque ANR, on place un microphone en face de deux enceintes sonores. La première enceinte produit un son modélisant le bruit de l’avion par un signal de fréquence unique. Le document 1 donné en annexe montre l’évolution temporelle de la tension u1 aux bornes du microphone.
4. Représenter sur le document 1 en annexe page 16 / 16 à rendre avec la copie , l’allure du signal que doit produire la deuxième enceinte pour « supprimer » le son modélisant le bruit de l’avion.
Le signal que doit produire la deuxième enceinte pour « supprimer » le son modélisant le bruit de l’avion doit produire des interférences destructives. Ainsi les deux ondes doivent être en opposition de phase.
Partie 2 – Détermination expérimentale de l’altitude au moment de l’ouverture du parachute
L’élève parachutiste et son moniteur quittent simultanément l’avion en un point A, d’altitude 𝑧A = 1 500 m. Tout au long du saut, le moniteur reste à la même altitude que son élève. Lorsque l’élève ouvre son parachute, le moniteur relève la valeur de l’altitude 𝑧B indiquée par son altimètre. Cette valeur sera utile pour le débriefing après le saut.
Le principe de fonctionnement de l’altimètre est basé sur la mesure d’une variation de pression à partir de laquelle est déduite une variation d’altitude. Cette partie s’intéresse à un modèle de détermination d’une variation d’altitude à partir de la mesure d’une variation de pression.
Données :
- D’après la loi fondamentale de la statique des fluides, la variation de pression entre les altitudes 𝑧 et 𝑧+ℎ est liée à la variation d’altitude ℎ par la relation :
p(𝑧) – p(𝑧 + ℎ) = ρ g ℎ
avec p en Pa, ℎ en m, g intensité du champ de pesanteur terrestre et ρ la masse volumique de l’air en kg⋅m−3 ;
- Echelle absolue de température : 𝑇 (K) = θ(°C) + 273,15 ;
- Constante des gaz parfaits : 𝑅 = 8,314 Pa⋅m3⋅mol−1.K−1 ;
- Masse molaire de l’air : M = 29,0 g ⋅ mol−1 ;
- À l’altitude 𝑧A = 1 500 m, la valeur de la pression est pA= 845 hPa et celle de la température est θA = 5,5 °C ;
Dans la situation étudiée, l’air peut être considéré comme un gaz parfait.
5. En utilisant l’équation d’état des gaz parfaits, montrer que la masse volumique de l’air à l’altitude 𝑧A = 1 500 m a pour valeur ρ = 1,06 kg⋅m−3.
$$\rho=\frac{m}{V}$$
Équation d’état des gaz parfaits : PV=nRT
$$V=\frac{nRT}{P}$$
D’ou
$$\rho=m \times \frac{P}{nRT}$$
Or $n=\frac{m}{M}$ , $m=n \times M$
D’ou
$$\rho=n \times M \times \frac{P}{nRT}$$
$$\rho=M \times \frac{P}{RT}$$
$$\rho=29,0 \times \frac{845.{10}^2}{8,314 \times (5,5+273,15)}$$
$$\rho=1,06.{10}^3g.m^{-3}$$
$$\rho=1,06\ Kg.m^{-3}$$
On suppose que cette valeur de la masse volumique de l’air est constante pour la hauteur de chute considérée.
Entre le point A et l’ouverture du parachute, l’altimètre a mesuré une différence de pression de 31,8 hPa.
6. Déterminer l’altitude 𝑧B qu’afficherait l’altimètre s’il utilisait la loi fondamentale de la statique des fluides.
Remarque : En pratique, les altimètres utilisent un autre modèle et une autre relation entre la variation de pression et l’altitude (formule du nivellement barométrique) car la température ainsi que la masse volumique de l’air varient avec l’altitude.
$$p(z)\ -\ p(z+h)\ =\ \rho gh$$
$$h=\frac{p\left(z\right)-\ p\left(z+h\right)}{\rho g}\$$
$$h=\frac{31,8.{10}^2}{1,06 \times 9,81}$$
h=306 m
$$z_B=z_A-h=1500-306$$
$$z_B=1194\ m$$
Partie 3 – Détermination théorique de l’altitude lors de l’ouverture du parachute
L’élève parachutiste ainsi que son moniteur quittent simultanément l’avion en un point A, à un instant pris comme origine des dates (t = 0 s). Lorsqu’ils sautent de l’avion, celui-ci vole horizontalement à l’altitude 𝑧A = 1 500 m avec une vitesse vA = 130 km⋅h−1.
L’élève a pour consigne d’enclencher l’ouverture de son parachute après avoir compté 10 secondes.
On étudie le mouvement du système {parachutiste + équipement} avant l’ouverture du parachute. Cette étude est réalisée dans le référentiel terrestre considéré comme galiléen.
Dans cette partie, pour modéliser le mouvement du parachutiste, on fait l’hypothèse que les actions de l’air sont négligeables et que le mouvement du système est plan.
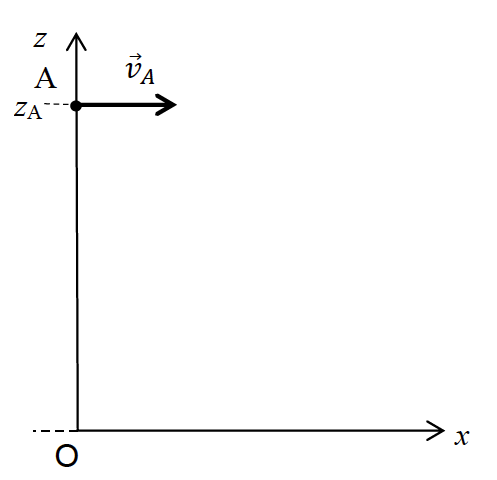
La position du parachutiste est repérée dans le système d’axes (O, 𝑥, 𝑧), l’origine O étant prise au niveau du sol qui correspond également ici au niveau de la mer. Le point 𝐴 est situé à la verticale du point O sur l’axe (O𝑧).
7. Indiquer la (ou les) action(s) exercée(s) sur le parachutiste et la (ou les) modéliser par une (ou des) force(s).
D’après le texte : « Dans cette partie, pour modéliser le mouvement du parachutiste, on fait l’hypothèse que les actions de l’air sont négligeables »
La terre exerce une action sur le parachutiste, elle est modélisée par la force poids : $\vec{P}=m\vec{g}$
8. En déduire, en justifiant, les coordonnées théoriques du vecteur accélération 𝑎𝑥(t) et 𝑎𝑧(t) et les expressions des coordonnées v𝑥(t) et v𝑧(t) du vecteur vitesse du centre de masse du système.
Réponse :
Système {parachutiste + équipement}
Référentiel terrestre supposé galiléen
D’après la deuxième loi de newton :
$\sum_{}^{}\overrightarrow{F}_{ext}=m\overrightarrow{a}$
$\overrightarrow{P}=m\overrightarrow{a}$
$m\overrightarrow{g}=m\overrightarrow{a}$
$\overrightarrow{a}=\overrightarrow{g}$
Or
$\overrightarrow{g} \begin{cases} 0 \\-g \end{cases}$
$\overrightarrow{a} \begin{cases} a_{x}(t)=0 \\a_{z}(t)=-g \end{cases}$
$\overrightarrow{a}=\frac{d \overrightarrow{v}}{dt}$
On intègre le système d’équation précédent :
$\overrightarrow{v} \begin{cases} v_{x}(t)=C_{1} \\v_{z}(t)=-gt+C_{2}\end{cases}$
Pour trouver les constantes, on utilise $\overrightarrow{v}_A$ :
$\overrightarrow{v}_A \begin{cases} v_{Ax}=v_{A} \\v_{Az}=0 \end{cases}$
d’ou
$\overrightarrow{v} \begin{cases} v_{x}(t)=v_{A} \\v_{z}(t)=-gt\end{cases}$
9. Montrer que les équations horaires du mouvement du parachutiste dans le repère (O, 𝑥, 𝑧) sont modélisées par :
$ \begin{cases} x(t)=v_A t \\ z(t)=- \frac{1}{2} g \times t^2+z_A \end{cases}$
avec t en seconde, vA en mètre par seconde et 𝑥(t), 𝑧(t) et 𝑧A en mètre.
Réponse :
$\overrightarrow{v}=\frac{d \overrightarrow{OM}}{dt}$
On intègre le système d’équation précédent :
$\overrightarrow{OM} \begin{cases} x(t)=v_A \times t +C_{3} \\z(t)=-\frac{1}{2}gt^2 + C_{4}\end{cases}$
Pour trouver les constantes, on utilise $\overrightarrow{OA}$
$\overrightarrow{OA} \begin{cases} x_A=0 \\z_A=z_A \end{cases}$
d’ou
$\overrightarrow{OM} \begin{cases} x(t)=v_A \times t \\ z(t)=-\frac{1}{2} g \times t^2+z_A \end{cases}$
10. Déterminer l’altitude théorique 𝑧C à laquelle le parachutiste devrait ouvrir son parachute sachant que cette ouverture doit avoir lieu 10 s après le saut.
$$z_c=z_{\left(t=10\right)}=-\frac{1}{2} \times 9,81 \times {10}^2+1500$$
$$z_c=1,0.{10}^3m$$
L’altimètre du moniteur indique 𝑧B = 1,2 × 103 m lorsque l’élève ouvre son parachute.
11. Proposer au moins deux raisons pour expliquer la différence entre la valeur mesurée 𝑧B et la valeur calculée 𝑧C.
Raisons pour expliquer la différence entre la valeur mesurée ZB et la valeur calculée ZC :
- Nous avons négligé les forces de frottements.
- L’élève a ouvert son parachute trop tôt (il a compté trop vite les 10s)
Partie 4 – Parachute de secours
Si le parachute ne s’ouvre pas, la vitesse de chute peut atteindre 200 km⋅h−1. Un déclencheur de sécurité doit alors libérer le parachute de secours. Pour être pleinement fonctionnel, il doit respecter les deux conditions suivantes :
- Il doit entrer en action avant que l’altitude ne devienne inférieure à 320 m (condition sur l’altitude).
- Il doit permettre de passer de 200 km⋅h−1 à moins de 20 km⋅h−1 en 10 s (condition sur la vitesse).
Une fois le parachute de secours ouvert, les frottements dans l’air ne sont plus négligeables.
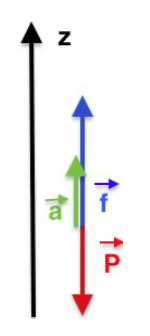
Ils sont modélisés par une force, notée $\overrightarrow{f}$, de sens opposé au vecteur vitesse et de valeur proportionnelle au carré de la vitesse :
f = 𝑘 v2
𝑘 est appelé coefficient de frottement.
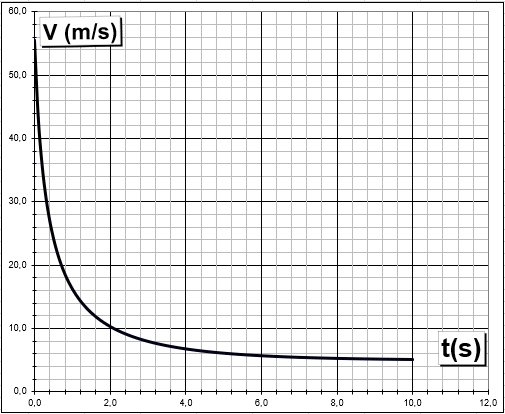
Cette modélisation des frottements a permis de tracer le graphique représentant l’évolution de la vitesse du centre de masse du système {parachutiste + équipement} (figure 2). Sur ce graphique, l’origine des dates correspond à l’ouverture du parachute de secours.
Dans la suite, le mouvement est considéré vertical depuis la date d’ouverture du parachute de secours jusqu’à la date d’arrivée sur le sol.
12. Montrer que la modélisation rend bien compte de la condition de fonctionnement du parachute de secours portant sur la vitesse.
D’après le texte : « il doit respecter les deux conditions suivantes :
- Il doit entrer en action avant que l’altitude ne devienne inférieure à 320 m (condition sur l’altitude).
- Il doit permettre de passer de 200 km.h− 1 à moins de 20 km.h− 1 en 10 s (condition sur la vitesse). »
Par lecture graphique :
$v_{(t=0s)}=56\ m{.s}^{-1}=201\ km{.h}^{-1}$
$v_{(t=10s)}=5,0\ m{.s}^{-1}=18\ km{.h}^{-1}$
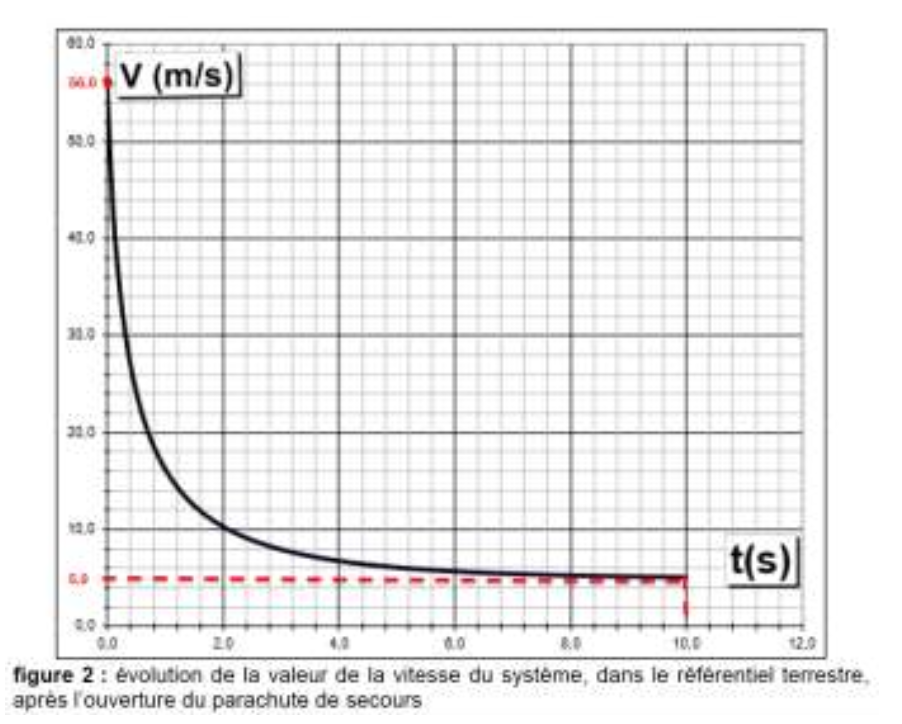
Il permet bien de passer de 200 km.h− 1 à moins de 20 km.h− 1 en 10 s
On cherche à déterminer les caractéristiques du vecteur accélération 2 s après le déclenchement du parachute de secours. Pour cela, on doit d’abord retrouver la valeur du coefficient de frottement 𝑘 utilisée dans cette modélisation.
13. Écrire la relation entre le vecteur accélération $\overrightarrow{a}$ du système, et les forces modélisant les actions s’exerçant sur le système.
Système {parachutiste + équipement}
Référentiel terrestre supposé galiléen
D’après la deuxième loi de newton :
$$\Sigma\vec{F_{ext}}=m\vec{a}$$
$$\vec{P}+\vec{f}=m\vec{a}$$
$$\vec{a}=\frac{\vec{P}+\vec{f}}{m}$$
Après la date t = 9 s, on peut considérer que la vitesse prend une valeur constante vf.
14. Écrire, à partir de cette date, la relation entre les valeurs des forces et en déduire l’expression du coefficient de frottement 𝑘 en fonction de 𝑚, g et vf.
D’après le texte : « le mouvement est considéré vertical » et » Après la date t= 9 s, on peut considérer que la vitesse prend une valeur constante vf »
Ainsi, le parachutiste a un mouvement rectiligne uniforme
D’après la 1ere loi de Newton
$\Sigma\vec{F_{ext}}=\vec{0}$
$\vec{P}+\vec{f}=\vec{0}$
En projetant :
-P+f=0
$-mg+kv_f^2=0$
$kv_f^2=mg$
$k=\frac{mg}{v_f^2}$

15. En déduire la valeur du coefficient de frottement 𝑘 choisi pour la modélisation.
Préciser l’unité de 𝑘.
$$k=\frac{mg}{v_f^2}$$
Pour trouver l’unité, nous faisons une analyse dimensionnelle :
$$\left[k\right]=\frac{\left[m\right]\left[g\right]}{\left[v_f\right]^2}=\frac{kg{ \times m.s}^{-2}}{\left({m.s}^{-1}\right)^2}=\frac{kg{ \times m.s}^{-2}}{{m^2.s}^{-2}}=kg{.m}^{-1}$$
Application numérique :
$$k=\frac{75 \times 9.81}{{5,0}^2}=29\ kg{.m}^{-1}$$
16. Donner les caractéristiques (sens, direction et valeur) du vecteur accélération du système à la date t= 2 s . Commenter.
$$\vec{a}=\frac{\vec{P}+\vec{f}}{m}$$
En projetant :
$$a=\frac{-m.g+kv_f^2}{m}$$
$$a=-g+\frac{kv_f^2}{m}$$
$$a=-9,81+\frac{29 \times {10}^2}{75}$$
$$a=29,4\ m{.s}^{-2}$$

Le vecteur accélération a la même direction que $\vec{P}$ et $ \vec{f}$, il est vertical.
Il est positif donc orienté vers le haut.
Il est opposé à $\vec{v}$, le mouvement est donc décéléré.
ANNEXE À RENDRE AVEC LA COPIE
EXERCICE I : APPRENTISSAGE DU SAUT EN PARACHUTE
Question 4