
Bac Amérique du nord 2021 Sujet 2
Exercice 1– (10 points) – Commun à tous les candidats – Durée 1h45 – Calculatrice autorisée
Sujet n° 21-PYCJ2AN1
Sujet et corrigé
Mots-clés : mouvement d’un satellite ; 2ème loi de Newton ; champ de gravitation ; champ électrique ; interférences lumineuses ; capacité d’un condensateur.
L’attraction gravitationnelle de notre planète varie faiblement d’un mois à l’autre. Ces faibles variations de la gravité sont principalement dues à une infime fraction de la masse terrestre, constamment en mouvement, essentiellement de l’eau : la pluie tombe, la rosée s’évapore, les courants océaniques coulent, la glace fond…
Le 22 mai 2018, deux satellites scientifiques GRACE-FO (Gravity Recovery and Climate Experiment – Follow-on) sont lancés. Ces deux satellites jumeaux situés sur la même orbite ont pour objectif de mesurer avec une grande précision les variations mensuelles du champ de gravité de la Terre afin de suivre les masses d’eau liquide ou gelée.
A. Caractéristiques de l’orbite
L’orbite des satellites de la mission GRACE-FO est quasi circulaire à l’altitude z égale à 490 km. L’inclinaison du plan de la trajectoire sur l’équateur est égale à 89,0 degrés ; on parle d’une orbite polaire. Les deux satellites jumeaux se déplacent sur la même orbite à une distance, notée L, de 220 km l’un de l’autre. Leur altitude leur permet de parcourir environ 15 fois leur orbite polaire par jour et d’obtenir ainsi une cartographie mensuelle de l’évolution des masses d’eau.
On étudie le mouvement d’un de ces satellites, de masse m, dans le référentiel géocentrique considéré galiléen.
Données :
- constante de gravitation universelle : G = 6,67×10-11N∙m2∙kg-2
- masse de la Terre : MT = 5,98 × 1024 kg
- rayon de la Terre : RT = 6 371 km
A.1. Sur la copie, faire un schéma, sans souci d’échelle, montrant la Terre (de centre T) et le rayon RT, et le satellite de centre S sur son orbite à une altitude z. Représenter sur ce schéma un vecteur unitaire $\overrightarrow{n} $ dirigé du satellite vers la Terre.
Réponse :
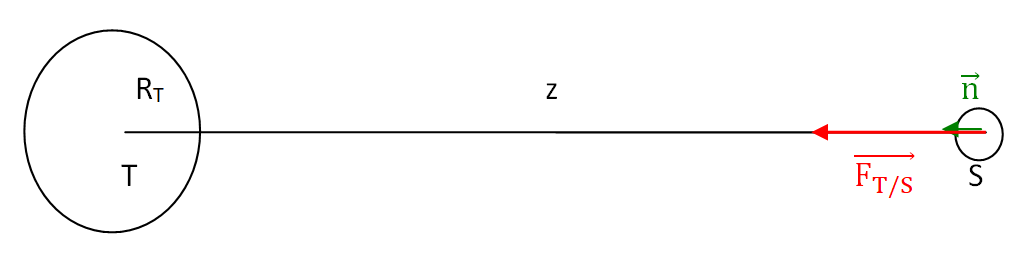
A.2. Donner l’expression vectorielle, en fonction de G, m, MT, RT, z et $\overrightarrow{n} $ ,de la force gravitationnelle $\overrightarrow{F_T_/_S} $ exercée par la Terre sur le satellite supposé ponctuel. Représenter ce vecteur-force, sans souci d’échelle, sur le schéma réalisé à la question A.1.
Réponse :
$\overrightarrow{F}_{T/S}=G\times \frac{m\times M_{T}}{(R_T+z)^2}\overrightarrow{n}$
A.3. En déduire l’expression vectorielle du champ gravitationnel terrestre $\overrightarrow{g} $
Réponse :
$\overrightarrow{P}=\overrightarrow{F}_{T/S}$
$m\overrightarrow{g}=G\times \frac{m\times M_{T}}{(R_T+z)^2}\overrightarrow{n}$
$\overrightarrow{g}=G\times \frac{M_{T}}{(R_T+z)^2}\overrightarrow{n}$
A.4. En considérant uniquement l’action de la Terre, établir l’expression vectorielle de l’accélération $\overrightarrow{a} $ du satellite.
Réponse :
Système : satellite
Référentiel : Géocentrique supposé galiléen
$\sum_{}^{}\overrightarrow{F_{ext}}=m\overrightarrow{a}$
$\overrightarrow{F}_{T/S}=m\overrightarrow{a}_{S}$
$G\times \frac{m\times M_{T}}{(R_T+z)^2}\overrightarrow{n}=m\overrightarrow{a}$
$\overrightarrow{a}=G\times \frac{M_{T}}{(R_T+z)^2}\overrightarrow{n}$
A.5. Montrer que, dans le cadre de l’approximation d’une orbite circulaire, le mouvement du satellite est uniforme.
Réponse :
$\overrightarrow{a}=G\times \frac{M_{T}}{(R_T+z)^2}\overrightarrow{n}$ (question A.4.)
Or, pour un mouvement circulaire, dans la base de Frenet, le vecteur accélération est de la forme :
$\vec{a}=\frac{v^2}{R_T+z}\vec{n}+\frac{dv}{dt}\vec{t}$
L’accélération étant unique, par identification :
$\frac{dv}{dt}=0$
donc v=constante donc le satellite à un mouvement circulaire uniforme.
A.6. Montrer alors que l’expression de la vitesse v du satellite s’exprime par la relation :
$v= \sqrt{ \frac{G \cdot M_T }{R_T+z}}$
Réponse :
$\overrightarrow{a}=G\times \frac{M_{T}}{(R_T+z)^2}\overrightarrow{n}$ (question A.4.)
Or, pour un mouvement circulaire, dans la base de Frenet, le vecteur accélération est de la forme :
$\vec{a}=\frac{v^2}{R_T+z}\vec{n}+\frac{dv}{dt}\vec{t}$
L’accélération étant unique, par identification :
$\frac{v^2}{R_T+z}=G\ \times \frac{M_T}{(R_T+z)^2}$
donc
$v=\sqrt{\frac{G\times M_{T}}{R_T+z}}$
A.7. En déduire la valeur de la période de révolution du satellite et vérifier qu’elle est conforme à l’information de l’énoncé : « leur altitude leur permet de parcourir environ 15 fois leur orbite polaire par jour ».
Réponse :
La période de révolution est :
$T=\frac{circonference}{vitesse}$
$T=\frac{2\pi (R_T+z)}{v}$
$T=\frac{2\pi (R_T+z)}{\sqrt{\frac{G\times M_{T}}{(R_T+z)}}}$
$T=2\pi (R_T+z) \sqrt{\frac{(R_T+z)}{G\times M_{T}}}$
$T=2\pi\sqrt{\frac{(R_T+z)^3}{G\times M_{T}}}$
$T=2\pi\sqrt{\frac{(6371\times 10^{3}+490 \times 10^{3})^3}{6,67 \times 10^{-11}\times 5,98 \times 10^{24}}}$
$T=5653 s =1 h 34$
Le nombre de tour en une journée :
$N=\frac{24\times 3600}{5653}=15,3 tours$
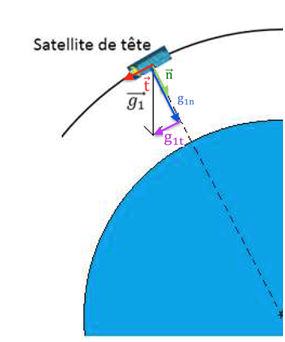
On s’intéresse à la situation particulière schématisée ci-dessous. Le satellite de tête passe au-dessus d’une zone où le champ gravitationnel $\overrightarrow{g_1} $ n’est pas centripète alors que le 2ème satellite survole une zone où règne un champ gravitationnel $\overrightarrow{g_2} $ centripète.
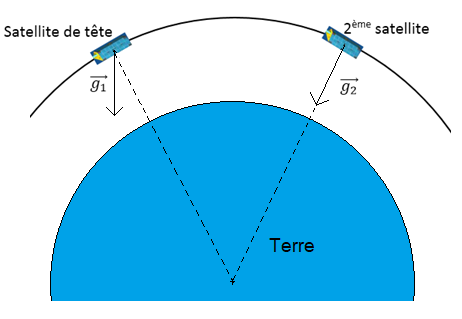
A.8. Dans le cas de la situation schématisée, expliquer, en détaillant le raisonnement, si la distance, L, entre les deux satellites reste constante, augmente ou bien diminue.
Réponse :
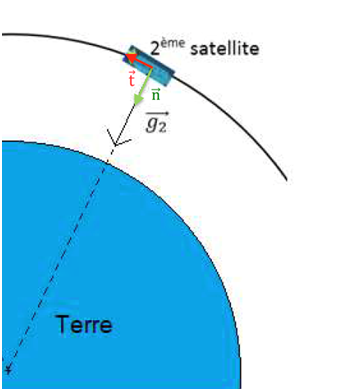
Pour le 2ème satellite
$\vec{g}_2=g_2\vec{n}$
$\vec{a}_2=g_2\vec{n}$
$\vec{a}_2=\frac{v_2^2}{R_T+z}\vec{n}+\frac{dv_2}{dt}\vec{t}$
L’accélération étant unique, par identification :
$\frac{dv_2}{dt}=0$ donc $v_2=constante$ donc le satellite à un mouvement circulaire uniforme.
Pour le 1er satellite
$\vec{g}1=g_{1n}\vec{n}+g_{1t}\vec{t}$
$\vec{a}_1=g_{1n}\vec{n}+g_{1t}\vec{t}$
$\vec{a}_2=\frac{v_1^2}{R_T+z}\vec{n}+\frac{dv_1}{dt}\vec{t}$
L’accélération étant unique, par identification :
$\frac{dv_1}{dt}=g_{1t} >0 $ donc $v_1$ augmente donc le satellite à un mouvement circulaire accéléré.
B. Principe de fonctionnement de l’interféromètre embarqué
Le satellite de tête est affecté en premier par un changement du champ gravitationnel, cela engendre alors une légère modification de la distance le séparant du 2ème satellite. La mesure, par interférométrie, des variations de distance entre les deux satellites permet d’accéder à l’évolution du champ gravitationnel dans la région survolée. À cet effet, un interféromètre laser, dont une partie est embarquée dans le satellite de tête et l’autre partie dans le 2ème satellite, détermine avec une très grande précision la variation de distance, notée d, entre les deux satellites.
Le schéma simplifié du principe de fonctionnement de l’interféromètre est le suivant :
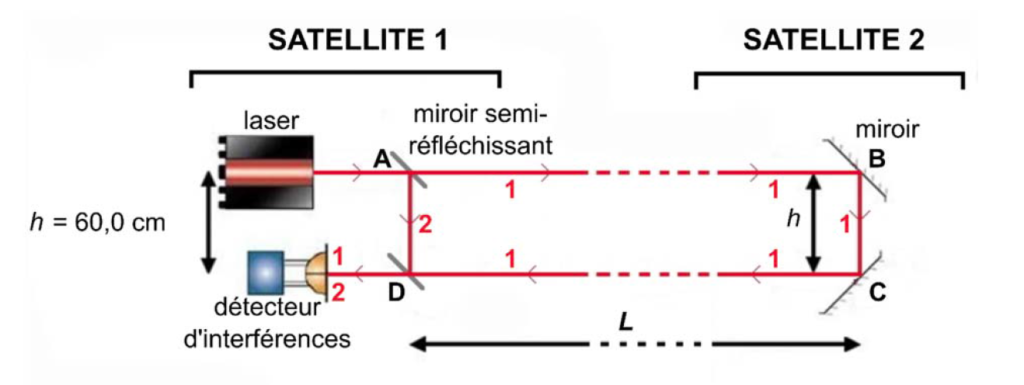
Le faisceau lumineux issu du laser se sépare en deux faisceaux au niveau du miroir semi-réfléchissant A : un faisceau 1 parcourant le trajet ABCD, un faisceau 2 parcourant le trajet AD. Les faisceaux 1 et 2 se réunissent en D pour atteindre le détecteur d’interférences.
Le laser utilisé émet un rayonnement infrarouge de longueur d’onde λ égale à 1064 nm dans le vide.
B.1. Justifier que le dispositif présenté par le schéma simplifié permet d’obtenir des interférences.
Réponse :
Deux sources sont cohérentes car elles proviennent de la même source. On observe alors des franges d’interférences stables lorsqu’elles se croisent.
B.2. Définir le phénomène d’interférence constructive de deux ondes.
Réponse :
Il y a interférence constructive en un point M lorsque deux ondes arrivent en phase en ce point. L’amplitude résultante est alors maximale.
B.3. En utilisant les informations figurant sur le schéma, établir l’expression de la différence de marche d en fonction de L.
Réponse :
δ= d1 – d2
δ= ABCD – AD
δ= 2L+h – h
δ= 2L
Le satellite 1 s’éloigne d’une distance d du satellite 2. Les deux satellites sont maintenant distants de L + d.
B.4. Montrer alors que la variation Δd de la différence de marche vaut 2d.
Réponse :
La nouvelle différence de marche s’écrit :
δ’= d’1 – d’2
δ’= ABCD – AD
δ’= 2L+2d+h – h
δ’= 2L+2d
La variation de la différence de marche s’écrit :
∆δ=δ’-δ
∆δ=2L+2d-2L
∆δ=2d
Le détecteur d’interférences est capable de repérer au mieux une variation de différence de marche qui correspond à deux états immédiatement successifs d’interférence constructive.
B.5. Justifier que la variation de distance d correspondant à deux états immédiatement successifs d’interférence constructive est égale à λ/2 .
Réponse : On observe des interférences constructives quand ∆δ=kλ, deux états immédiatement successif d’interférences constructive correspondent à k=1 , ∆δ=λ
Or ∆δ=2d
D’ou 2d=λ
d= λ/2
B.6. Calculer alors la plus petite valeur de la variation de distance entre les deux satellites détectable par l’interféromètre.
Réponse :
d= λ/2=1064/2=532 nm
C. Principe des accéléromètres
Pour accéder au champ gravitationnel terrestre de manière très précise, il est indispensable de mesurer les forces non-gravitationnelles (trainée atmosphérique, pression des radiations solaires…) susceptibles de parasiter les mesures.
Des accéléromètres ultrasensibles embarqués à bord des satellites permettent d’accéder indirectement aux forces non-gravitationnelles par la mesure de la variation des capacités de plusieurs condensateurs. Une « masse d’épreuve », maintenue en suspension au centre d’une cage électrostatique, subit un déplacement lorsqu’elle est soumise à une force non-gravitationnelle. Son déplacement se traduit par la modification de la capacité de trois paires de condensateurs.

On étudie le fonctionnement d’un condensateur plan dont la face gauche de la masse d’épreuve constitue l’armature mobile (voir le schéma ci-dessous), l’autre armature étant fixée sur la cage électrostatique
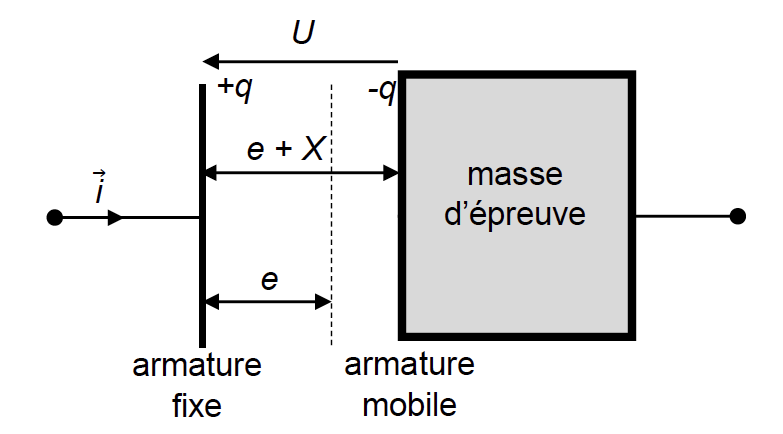
On applique une tension U entre les armatures du condensateur plan. En l’absence de force non- gravitationnelle, la distance entre les deux armatures (fixe et mobile) est notée e. En présence d’une force non-gravitationnelle, l’armature mobile subit un déplacement X (compté positivement) dans la direction définie par le vecteur unitaire $\overrightarrow{i} $ indiqué sur le schéma ci-dessus.
Pour un condensateur plan, la capacité C s’exprime par la relation $C= \frac{\varepsilon_0 \cdot S}{D} $ où ε0 représente la permittivité électrique du vide, S la surface en regard des armatures et D la distance entre les armatures.
C.1. Discuter de l’influence du déplacement X, choisi positif, sur la valeur de la capacité C du condensateur.
Réponse :
$C= \frac{\varepsilon_0 \cdot S}{D} $
Or D=e+X
$C= \frac{\varepsilon_0 \cdot S}{e+X} $
Si X augmente, c diminue car ils sont inversement proportionnels.
C.2. Donner l’expression du champ électrique $\overrightarrow{E} $ créé entre les plaques du condensateur en fonction de U, e, X et du vecteur unitaire $\overrightarrow{i} $.
Réponse :
$E=\frac{U}{D}=\frac{U}{e+X}$
$\vec{E}=\frac{U}{e+X}\vec{i}$
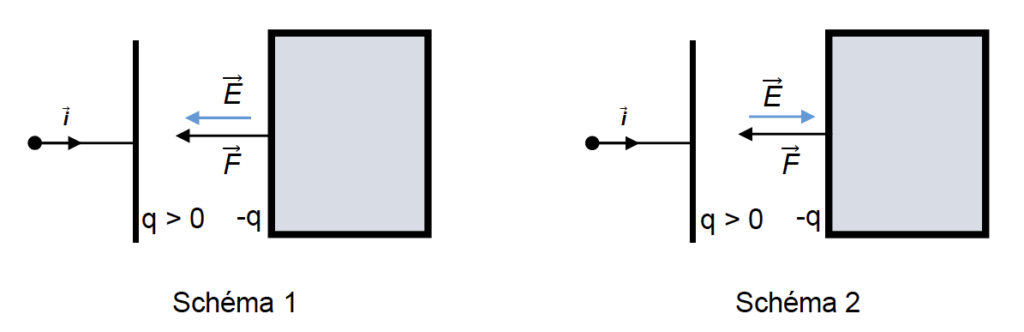
L’armature mobile est soumise au champ $\overrightarrow{E_1} $ créé par l’armature fixe. Les lois de l’électrostatique montrent que $\overrightarrow{E_1} =\frac{ \overrightarrow{E_1}} {2}$ . Il en résulte que l’armature mobile subit une action mécanique modélisée par la force électrique $\overrightarrow{F} $. On s’intéresse à la situation où la charge électrique q portée par l’armature fixe est positive.
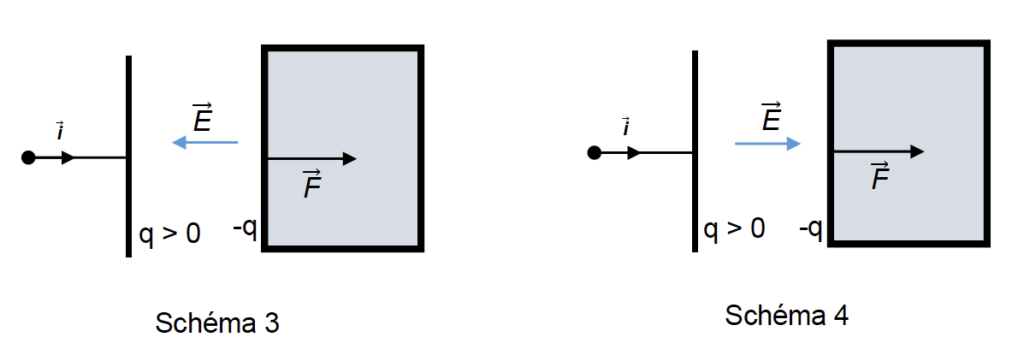
C.3. Identifier le schéma qui, parmi les quatre suivants, représente correctement le champ électrique $\overrightarrow{E} $ et la force électrique $\overrightarrow{F} $. Une argumentation est attendue.
Réponse :
$\vec{E}$ est perpendiculaire et dirigé du plus vers le moins. On élimine donc les schémas 1 et 3.
$\vec{F}_{mobile}=q_{mobile}\vec{E}$
Or qmobile=-q
$\vec{F}_{mobile}=-q\vec{E}$
Donc $\vec{F}_{mobile}$ a un sens opposé à $\vec{E}$
On élimine le schéma 4. Le bon schéma est le 2
Le condensateur (décrit sur le schéma précédent) est associé à un deuxième condensateur. La masse d’épreuve est mobile entre deux armatures fixes, l’une à gauche, l’autre à droite. Le dispositif est conçu de telle sorte que la force électrostatique exercée par l’armature fixe de droite sur la masse d’épreuve est exactement opposée à la force électrostatique exercée par l’armature fixe de gauche : les deux forces se compensent.
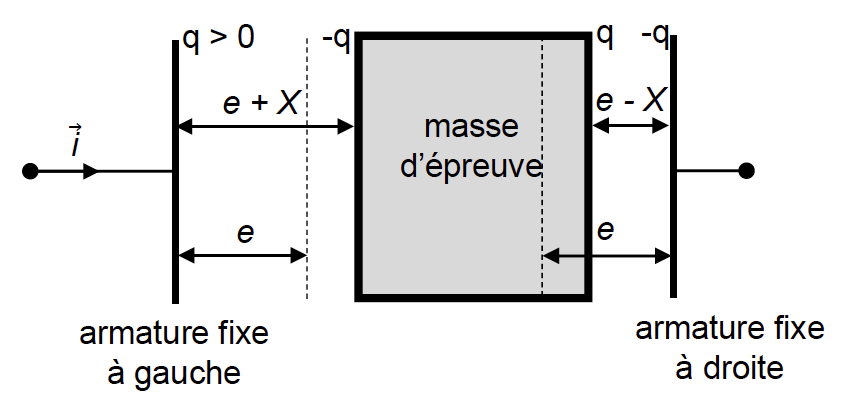
C.4. Établir la relation existant entre le champ électrique $\overrightarrow{E_d} $ créé par l’armature fixe de droite et le champ électrique $\overrightarrow{E_g} $ créé par l’armature fixe de gauche.
Réponse :
D’après le sujet « Les deux forces se compensent »
$\vec{F}_d+\vec{F}_g=0$
$q_d.\vec{E}_d+q_g.\vec{E}_g=0$
$q.\vec{E}_d+-q.\vec{E}_g=0$
$q.\vec{E}_d-q.\vec{E}_g=0$
$q.\vec{E}_d=q.\vec{E}_g$
$\vec{E}_d=\vec{E}_g$