
Bac Amérique du nord 2025 Sujet 1
Exercice 2 – (5 points) – Durée 0h53 – Calculatrice autorisée
Sujet n°25-PYCJ1AN1
Sujet et corrigé
EXERCICE 2 : PHYSIQUE ET RACCORDEMENTS ROUTIERS (5 POINTS)
Lors de la création d’un nouveau raccordement routier, les ingénieurs en génie civil doivent déterminer la trajectoire la plus sûre pour les usagers. La réussite de leur travail tient alors beaucoup à une courbe plane remarquable appelée clothoïde (figure 1) qui permet de raccorder une ligne droite à un cercle.
Ce raccordement permet de réduire les risques en assurant une augmentation linéaire dans le temps de l’accélération jusqu’à une valeur constante et maximale dans l’arc de cercle.
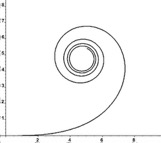
Figure 1. Représentation graphique d’une clothoïde
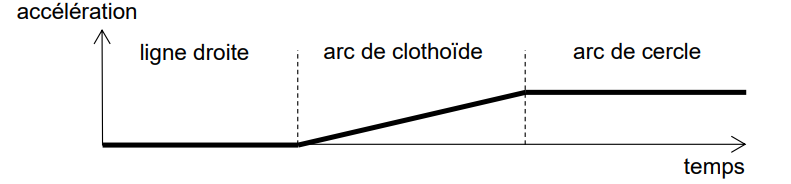
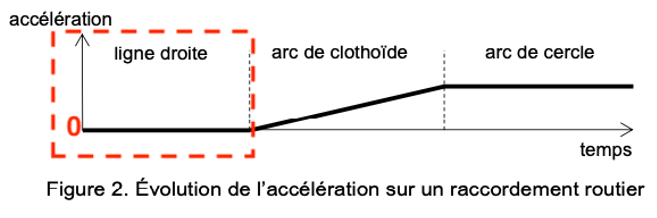
Figure 2. Évolution de l’accélération sur un raccordement routier
On illustre la situation en considérant un véhicule roulant sur l’échangeur de Cronenbourg qui raccorde l’A351 à l’autoroute A35. L’étude est menée dans le référentiel terrestre supposé galliléen.
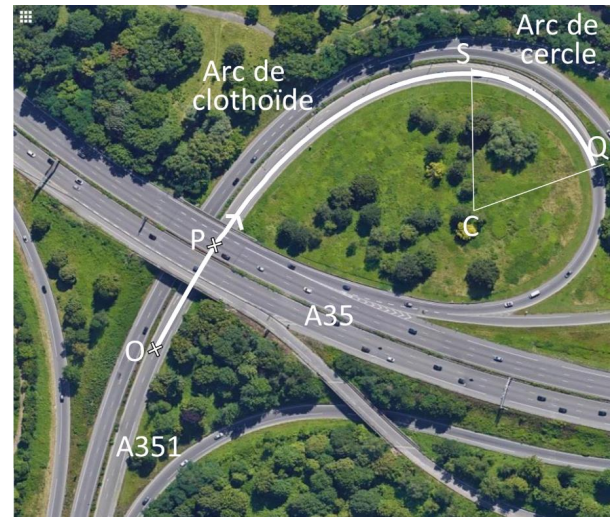
Figure 3. Vue aérienne partielle de l’échangeur de Cronenbourg, Bas-Rhin ; coordonnées : 48°35’02.9″N, 7°43’31.8″E
Source : ©2020 CNES/Airbus, GeoBasis-DE/BKG, GeoContent, Maxar Technologies, données cartographiques.
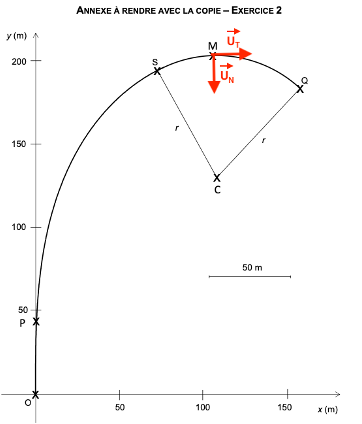
Sur la vue aérienne partielle de l’échangeur de Cronenbourg, on distingue un arc de clothoïde suivi d’un arc de cercle. Cette modélisation est reproduite en Annexe à rendre avec la copie (page 14). Un repère orthonormé (O, x, y), dont l’origine O est placée au début de l’arc de clothoïde, permet le repérage des positions.
1. Mouvement sur l’arc de clothoïde (entre O et S)
La partie OP de l’échangeur au début de l’arc de clothoïde est considérée comme une ligne droite horizontale.
Q.1. Déterminer la valeur de l’accélération du véhicule sur la portion OP à partir de la figure 2 et caractériser le mouvement du véhicule.
D’après le sujet : « La partie OP de l’échangeur au début de l’arc de clothoïde est considérée comme une ligne droite horizontale. »
Sur la figure 2, pour cette première partie en ligne droite, on lit a =0 m.s-2.
Le mouvement du véhicule est donc rectiligne uniforme.
On s’intéresse à un véhicule parcourant la trajectoire plane et horizontale entre O et S. Ce véhicule est assimilé à un point matériel M, d’accélération initiale nulle et animé d’une vitesse de norme constante v égale à 15,0 m·s-1. Ses coordonnées x et y, prises à intervalle de temps régulier, sont introduites dans le programme Python ci-dessous :
1 | #début du programme
2 | from math import *
3 | #-----Coordonnées des positions du véhicule-----
4 | t=[0.00, 1.50, 3.00, 4.50, 6.00, 7.50, 9.00, 10.5, 12.0, 13.5, 15.0]
5 | x=[0.00, 0.0624, 0.4818, 1.625, 3.849, 7.500, 12.91, 20.37, 30.11, 42.25, 56.80]
6 | y=[0.00, 20.00, 39.99, 59.96, 79.83, 99.49, 118.7, 137.3, 154.7, 170.6, 184.3]
7 | vx = [ ]
8 | vy = [ ]
9 | dt = 1.50 #durée entre deux positions successives
10 | for i in range(0, len(t)-1) :
11 | vx.append((x[i+1]-x[i])/dt)
12 | vy.append((y[i+1]-y[i])/dt)
13 | t.pop(0) #supprime t[0] et décale liste t pour coïncider avec l'accélération
14 | ax = [ ]
15 | ay = [ ]
16 | a = [ ]
17 | for i in range(0, len(t)-1) :
18 | ax.append((vx[i+1]-vx[i])/dt)
19 | ay.append((vy[i+1]-vy[i])/dt)
20 | a.append(sqrt(ax[i]**2+ay[i]**2)) #norme du vecteur accélération
21 | print(t)
22 | print(a)
Les valeurs successives de la norme de l’accélération du véhicule calculées à l’aide du programme figurent dans le tableau suivant :
| t (s) | 1,50 | 3,00 | 4,50 | 6,00 | 7,50 | 9,00 |
| a (m·s-2) | 0,1587 | 0,3218 | 0,4824 | 0,6411 | 0,8070 | 0,9506 |
Q.2. Sur la copie, écrire les lignes de programme permettant de calculer les coordonnées ax et ay du vecteur accélération.
Ligne 18 : ax.append((vx[i+1]-vx[i])/dt)
Ligne 19 : ay.append((vy[i+1]-vy[i])/dt)
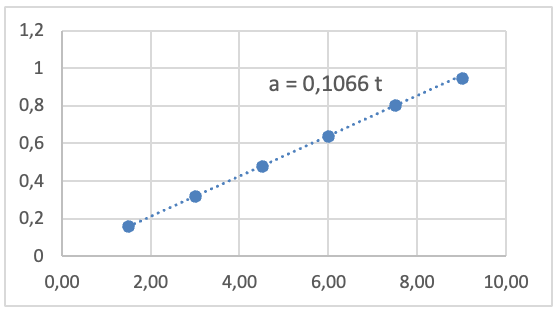
Q.3. À l’aide des valeurs données dans le tableau, vérifier l’information du texte introductif indiquant que la clothoïde permet « une augmentation linéaire dans le temps de l’accélération » en justifiant la méthode utilisée.
Méthode 1 :
On trace l’accélération en fonction du temps.
On obtient une droite passant par l’origine : c’est une fonction linéaire.
Ainsi, la clothoïde permet « une augmentation linéaire dans le temps de l’accélération ».
Méthode 2 :
On calcule le rapport a/t :
| a (m·s-2) | 0,1587 | 0,3218 | 0,4824 | 0,6411 | 0,807 | 0,9506 |
| t (s) | 1,50 | 3,00 | 4,50 | 6,00 | 7,50 | 9,00 |
| a/t (m·s-3) | 0,11 | 0,11 | 0,11 | 0,11 | 0,11 | 0,11 |
Le rapport a/t est constant : a est proportionnel à t, c’est une fonction linéaire.
Ainsi, la clothoïde permet « une augmentation linéaire dans le temps de l’accélération ».
2. Mouvement sur l’arc de cercle (entre S et Q)
Le véhicule, assimilé à un point matériel M, poursuit sa trajectoire en décrivant l’arc de cercle, de rayon r = 75,0 m, entre les points S et Q. La norme de la vitesse garde une valeur constante v égale à 15,0 m·s-1.
Q.4. Sur le schéma de l’Annexe à rendre avec la copie (page 14), tracer les vecteurs unitaires
$\vec{u}_T$ et $\vec{u}_N$ du repère de Frenet au point (M) de la trajectoire en arc de cercle.
Q.5. Justifier que le vecteur accélération du véhicule entre les points (S) et (Q) s’exprime ainsi :
$$ \vec{a} = \frac{v^{2}}{r},\vec{u}_N $$
Pour un mouvement circulaire, dans le repère de Frenet, le vecteur accélération est de la forme :
$$\vec{a}=\frac{v^2}{r}\vec{u}_N+\frac{dv}{dt}\vec{u}_T$$
D’après le sujet : La norme de la vitesse garde une valeur constante $v = 15,0\ \text{m·s}^{-1}$.
Ainsi, $\frac{dv}{dt}=0$.
On obtient donc :
$$\vec{a}=\frac{v^2}{r}\vec{u}_N$$
Q.6. Sur le schéma de l’Annexe à rendre avec la copie (page 14), représenter à l’échelle 1,0 cm pour 1,0 m·s-2, le vecteur accélération $\vec{a}$ au point M.
$$a=\frac{v^2}{r}$$
$$a=\frac{15,0^2}{75,0}$$
$$a=3,00\ \text{m.s}^{-2}$$
| 1,0 cm | $1,0\ \text{m.s}^{-2}$ |
| x | $3,00\ \text{m.s}^{-2}$ |
$$x=\frac{3,00\times 1,0}{1,0}=3,0\ \text{cm}$
On trace 3,0 cm pour le vecteur accélération.
$\vec{a}=\frac{v^2}{r}\vec{u}_N$ : le vecteur accélération a la même direction et le même sens que le vecteur $\vec{u}_N$.

Un véhicule immobile sur une route est soumis à deux actions mécaniques, modélisées par son poids $\vec{P}$ et la réaction $\vec{R}$ exercée par la chaussée. En mouvement uniforme dans un virage, le véhicule est aussi soumis à une action, modélisée par une force $f$ appelée force de frottement.
Les forces qui s’appliquent au véhicule sont contenues dans le plan vertical perpendiculaire à la route. Le point C est le centre de la trajectoire circulaire. Le véhicule est assimilé au point M.
Les cinq schémas suivants représentent le poids $\vec{P}$, la réaction $\vec{R}$ et la force de frottement $f$.
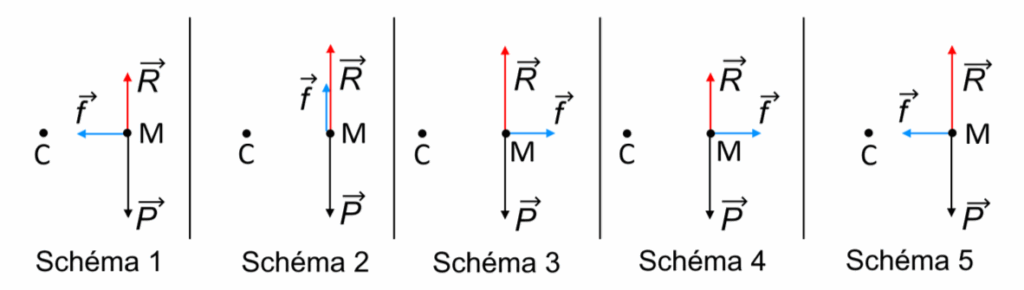
Q.7. Indiquer, en justifiant, le numéro du schéma qui représente correctement ces trois forces, en s’appuyant sur les caractéristiques du vecteur accélération.
D’après la 2nd loi de Newton :
$$\Sigma\vec{F_{ext}}=m\vec{a}$$
$$\vec{P}+\vec{f}+\vec{R}=m\frac{v^2}{r}\vec{u}_N$$
Or la voiture ne se déplace pas sur l’axe $z$ : le poids et la réaction normale se compensent :
$$\vec{P}+\vec{R}=\vec{0}$$
On élimine le schéma 1 et 4.
Ainsi :
$$\vec{f}=m\frac{v^2}{r}\vec{u}_N$$
La force de frottement a la même direction et le même sens que $\vec{u}_N$ comme sur les schémas 1 et 5.
Or on a éliminé le schéma 1.
Ainsi, le numéro du schéma correct est : schéma 5.
Dans la pratique, la sécurité dans les virages dépend aussi de la qualité des pneus, de la suspension des roues et de l’adhérence de la chaussée. Pour un véhicule de masse 1 200 kg, la valeur de la force de frottement ne peut pas dépasser 10 400 N sur chaussée sèche et 7 200 N sur chaussée humide. Si ces valeurs sont atteintes alors l’adhérence à la route n’est plus assurée et le véhicule dérape.
Q.8. Dans le cas du virage étudié précédemment, choisir parmi les panneaux de limitations de vitesse ci-dessous celui qui devrait être placé avant le point O. Expliquer le raisonnement.

Le candidat est invité à prendre des initiatives et à présenter la démarche suivie, même si elle n’a pas abouti. La démarche est évaluée et nécessite d’être correctement présentée.
$$\vec{f}=m\frac{v^2}{r}\vec{u}_N$$
$$f=m\frac{v^2}{r}$$
$$m\frac{v^2}{r}=f$$
$$v^2=\frac{f\times r}{m}$$
$$v=\sqrt{\frac{f\times r}{m}}$$
« La valeur de la force de frottement ne peut pas dépasser 10 400 N sur chaussée sèche et 7 200 N sur chaussée humide. »
On conserve la valeur la plus faible, $f = 7200$ N.
$$v=\sqrt{\frac{7200\times 75,0}{1200}}$$
$$v=21,2\ \text{m.s}^{-1}$$
$$v=21,2\times 3,6$$
$$v=76,4\ \text{km.h}^{-1}$$
Parmi les panneaux, on choisit celui ne dépassant pas cette valeur :
→ 70 km.h⁻¹
Annexe à rendre avec la copie – Exercice 2
